服务热线
董小姐:19930237990, 王先生:13718806882
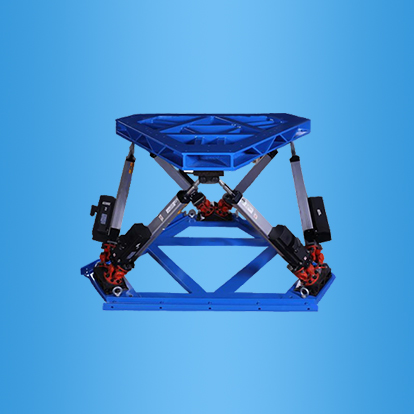
| 产品规格Product Specification | 产品参数Product parameters | |
|
运动范围 Range of motion |
横摇Roll | ±24.0° |
| 纵倾Pitch | ±23.0° | |
| 偏航Yaw | ±30.0° | |
| 升降 Heave | 士0.23m | |
| 前冲 Surge | 士0.32m | |
| 横移Sway | 士0.32m | |
| 线速度Linear velocity | 0.5m/s | |
| 线加速度Linear acceleration | 0.5g | |
| 角速度 Angular velocity | 40°/s | |
| 角加速度Angular acceleration | 9o°/s | |
| 最大动负载Gross moving load GML(upto) | 750kg | |
| 载荷X向转动惯量x-axis GML moment of inertia | 180kg*m2 | |
| 载荷Y向转动惯量Y-axis GML moment of inertia | 180kg*m2 | |
| 载荷z向转动惯量Z-axis GML moment of inertia | 180kg*m2 | |
| 供电要求 AC power | 380VAC | |
| 额定功率 Average power consumption | 7.8kW | |
| 峰值功率 Power consumption peak | 6.2kW | |
| 类别 | 序号 | 配置 | 名称 | 单位 | 数量 | 说明 |
| 硬件 | 1 | 标配 | 上平台 | 个 | 1 | 平台负载安装面 |
| 2 | 标配 | 下平台 | 个 | 1 | 平台基座 | |
| 3 | 标配 | 铰链座 | 套 | 12 | 上下台面和电动缸之间的连接部件 | |
| 4 | 标配 | 电动缸 | 套 | 6 | 包含缸筒、活塞杆及滚珠丝杆等 | |
| 5 | 标配 | 伺服电机 | 台 | 6 | 驱动电动缸运动 | |
| 6 | 标配 | 伺服驱动器 | 台 | 6 | 驱动伺服电机运动 | |
| 7 | 标配 | 电气控制柜 | 个 | 1 | 用来安装伺服驱动器 | |
| 8 | 标配 | 主控制板 | 块 | 1 | 包含下位机软件,实现平台运动的功能 | |
|
上位机控制功 能 |
1 | 标配 | 初始化 | 寻找电动缸零位 | ||
| 2 | 标配 | 底到中 | 平台从底位运行到中位 | |||
| 3 | 标配 | 中到底 | 平台从中位运行到底位 | |||
| 4 | 标配 | 回中位 | 平台从任意姿态运动到中位 | |||
| 5 | 标配 | 单步运动 | 平台根据输入的目标位置和速度,从当前位运动到目标位置 | |||
| 6 | 标配 | 正弦运动 | 平台根据输入的幅值、频率和相位,做相应的正弦运动 | |||
| 7 | 标配 | 数据脚本运动 | 平台根据输入的数据脚本进行运动 | |||
| 8 | 标配 | 单缸手动 | 可以手动控制每条电动缸的运动 | |||
| 9 | 标配 | 修改运动中心点 | 在原运动坐标点的基础上进行位置偏移 | |||
| 10 | 标配 | 保存实验数据 | 保存平台运动数据为TXT文件 | |||
|
上位机监视 功能 |
1 | 标配 | 电动缸长度显示 | 实时显示电动缸的长度 | ||
| 2 | 标配 | 驱动器状态显示 | 实时显示驱动器的状态 | |||
| 3 | 标配 | 六自由度正解 | 通过实际电动缸的长度结算成平台实际的姿态 | |||
| 4 | 标配 | 数据画图 | 将平台姿态数据实时绘制成图形 | |||
| 5 | 标配 | 性能监控 | 实时显示六个姿态的速度和加速度 | |||
| 辅助工具及文档 | 1 | 标配 | IP配置软件 | 可根据实际需求修改平台通讯的IP和端口 | ||
| 2 | 标配 | 速度加速度计算器 | 可根据四个参数(幅值、频率、速度、加速度)中的任意两个参数来计算另外两个参数 | |||
| 3 | 标配 | 虚拟下位机 | 模拟平台的工作状态,可用来调试通讯接口或自己开发的上位机 | |||
| 4 | 标配 | 通讯接口说明文档 | ||||
| 5 | 标配 | 平台使用说明书 | ||||
| 下位机软件 | 1 | 标配 | 初始化 | 寻找电动缸零位 | ||
| 2 | 标配 | 底到中 | 平台从底位运行到中位 | |||
| 3 | 标配 | 中到底 | 平台从中位运行到底位 | |||
| 4 | 标配 | 回中位 | 平台从任意姿态运动到中位 | |||
| 5 | 标配 | 指令运动 | 平台根据输入的运动指令进行相应运动 | |||
| 6 | 标配 | 数据运动 | 平台根据输入的姿态值进行实时运动 | |||
| 7 | 标配 | 单缸手动 | 可以手动控制每条电动缸的运动 | |||
| 8 | 标配 | 修改运动中心点 | 在原运动坐标点的基础上进行位置偏移 |
上一篇:重载型开环并联六轴系统
下一篇:没有了
地址:河北省廊坊市大厂回族自治县云樾东方
电话:董小姐:19930237990, 王先生:13718806882
邮箱:王先生:wbh@bjruy.com


Copyright © 2002-2021 北京瑞钰科技有限公司 版权所有 备案号:京ICP备2021033966号