简要描述:
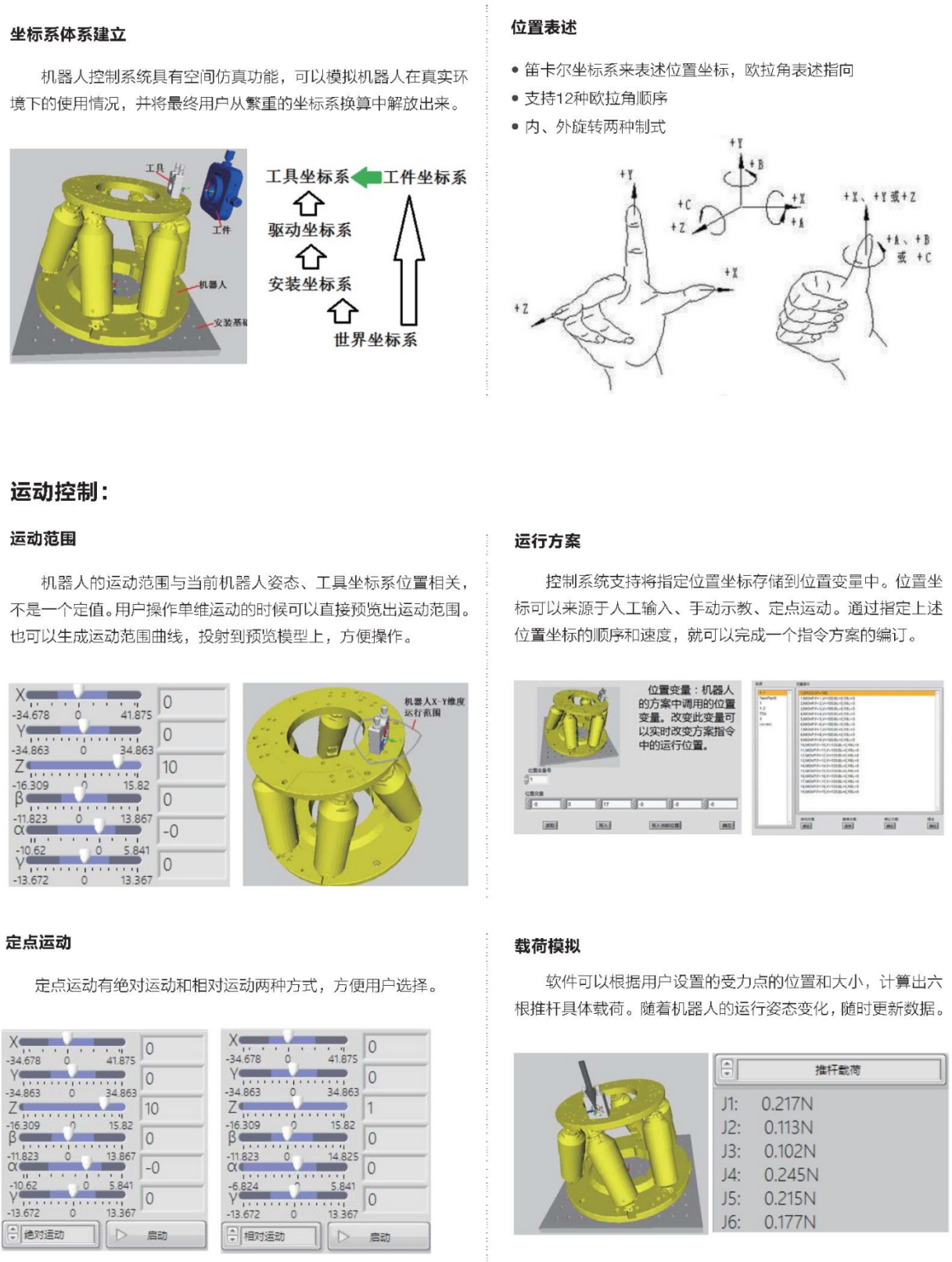
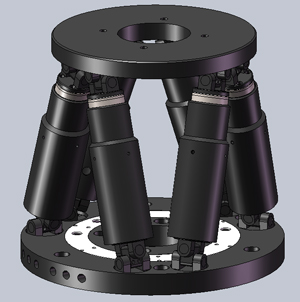
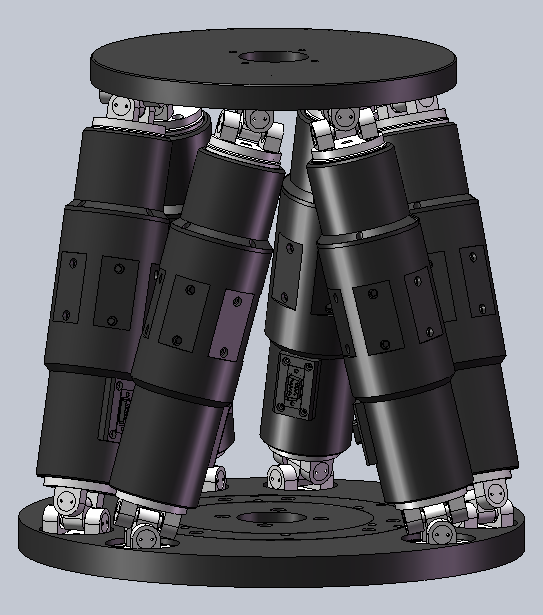
六自由度并联机器人的结构由上下两个平台,中间6个伸缩缸以及上下各6个虎克铰(或球铰)组成6-6形机构,称为Stewart平台。其中下平台固定,下平台与上平台通过6个伸缩缸及虎克铰连接,虎克铰或球铰位于上平台与6个伸缩缸的连接处,对保证平台的正常运行和整个结构刚度起着关键作用。借助伸缩缸的伸缩来实现上平台沿X、Y、Z的平移和绕X、Y、Z轴的旋转运动。一般伸缩缸由伺服电动缸或液压缸组成(大吨位的采用液压缸的形式)如下图2所示。借助六个伸缩缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,因此可广泛应用到各种训练模拟器中,如飞行模拟器、汽车驾驶模拟器、地震模拟器、卫星、导弹等飞行器、娱乐设备(动感电影摇摆台)等领域中。在加工业可制成六轴联动机床、机器人等。
特点:
自工业机器人问世以来,采用串联机构的机器人占主导位置。串联机器人具有结构简单、操作空间大,因而获得广泛应用。由于串联机器人自身的限制,研究人员逐渐把研究方向转向并联机器人。和串联机器人相比,六自由度并联机器人有以下特点:
1.并联结构其末端件上同时由6根杆支撑,与串联的悬臂梁相比刚度大,结构稳定。
2.由于刚度大,并联结构较串联结构在相同的自重或体积下,有较高的承载能力。
3.串联机构末端件上的误差是各个关节误差的积累和放大,因而误差大、精度低,并联式则没有那样的误差积累和放大关系,微动精度高。
4.串联机器人的驱动电机及传动系统大都放在运动着的大小臂上,增加了系统的惯量,恶化了动力性能,而并联机器人将电机置于机座上,减小了运动负荷。
5.在位置求解上,串联机构正解容易,但反解困难。而并联机构正解困难,反解非常容易
|
比较项目 |
并联机器人 |
串联机器人 |
|
工作空间 |
小 |
大 |
|
刚度 |
高 |
低 |
|
奇异性问题 |
多 |
少 |
|
负载能力 |
高 |
低 |
|
惯量 |
小 |
大 |
|
结构 |
复杂 |
简单 |
|
位置精度 |
误差平均化 |
误差积累 |
|
速度 |
较高 |
较低 |
|
加速度 |
较高 |
较低 |
|
承载力 |
多杆积累 |
单杆限制 |
|
位置反解 |
容易 |
困难 |
|
位置正解 |
困难 |
容易 |
|
控制 |
复杂 |
简单 |
|
型号 |
RUHX-180 |
RUHX-220 |
RUHX-360 |
|
运动轴 |
X,Y,Z,θX,θY,θZ |
|
X、Y最大行程 |
±30mm |
±55mm |
±125mm |
|
Z最大行程 |
±12.5mm |
±13.5mm |
±25mm |
|
θX、θY 行程(俯仰) |
±10° |
±15° |
±15° |
|
θZ行程 |
±25° |
±25° |
±30° |
|
电缸分辨率 |
0.25μm |
0.25μm |
0.05μm |
|
X、Y最小移动量 |
0.5μm |
0.5μm |
0.1μm |
|
Z最小移动量 |
0.5μm |
0.5μm |
0.1μm |
|
θX、θY最小移动量 |
0.001° |
0.001° |
0.0005° |
|
θZ最小位移动量 |
0.001° |
0.001° |
0.0005° |
|
X、Y回程 |
2μm |
2μm |
3μm |
|
Z回程 |
1μm |
1μm |
2μm |
|
θX、θY回程 |
0.001° |
0.001° |
0.001° |
|
θZ回程 |
0.002° |
0.002° |
0.002° |
|
X、Y双向重复精度 |
±0.5μm |
±0.5μm |
±1μm |
|
Z双向重复精度 |
±0.2μm |
±0.2μm |
±1.5μm |
|
θX、θY双向重复精度 |
±0.0005° |
±0.0005° |
±0.001° |
|
θZ双向重复精度 |
±0.0007° |
±0.0007° |
±0.001° |
|
X、Y和Z向上的最大速度 |
10mm/sec |
10mm/sec |
2mm/sec |
|
θX、θY、θZ向上的最大速度 |
5°/sec |
5°/sec |
1°/sec |
|
负载能力(底板为水平方向) |
2kg |
10kg |
80kg |
|
电机类型 |
两相步进电机(可换装伺服电机或五相步进电机或闭环步进电机) |
|
工作温度范围 |
0 到 50℃ |
|
材料 |
不锈钢,铝 |
|
质量 |
2.5kg |
3.5kg |
25kg |
注:以上为常规型号,可根据需求个性化定制,并可提供真空版本
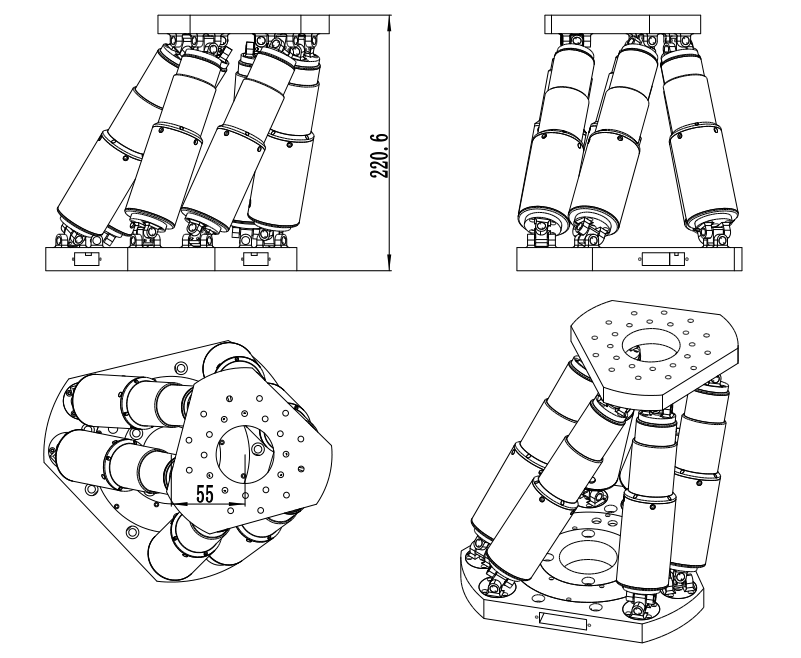
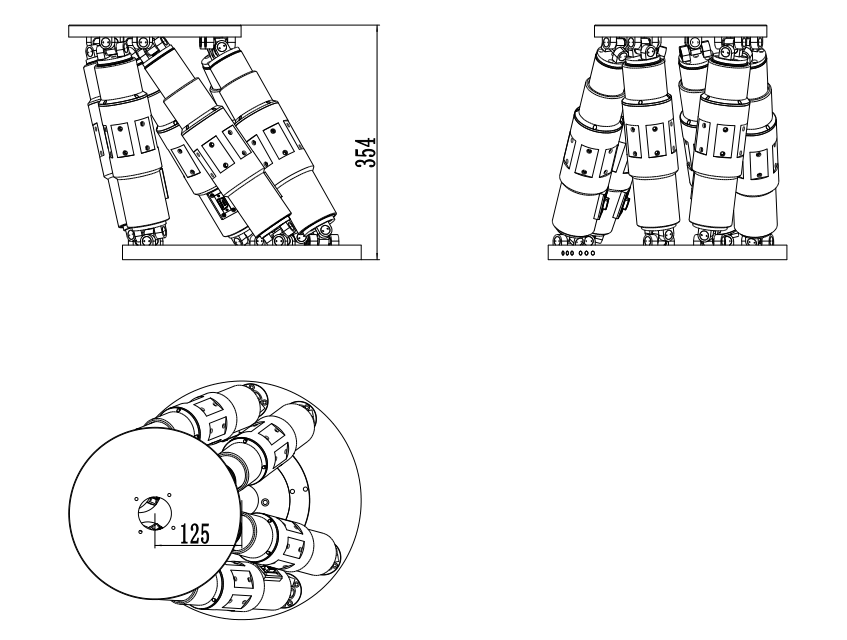
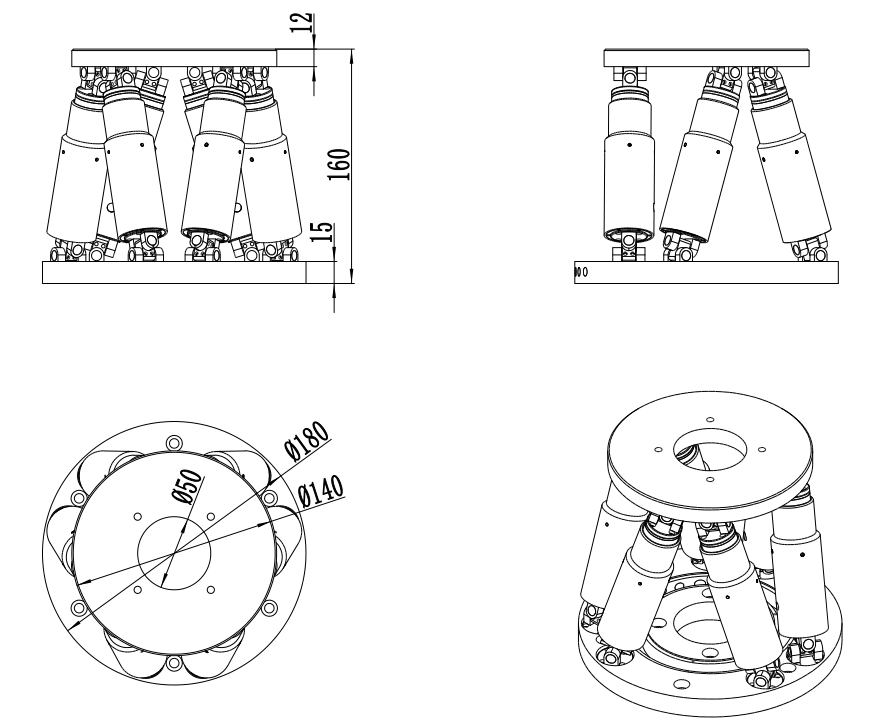 RUHX-180最低位置
RUHX-180最低位置
---------------------------------------------------------------------------------------------------------------------
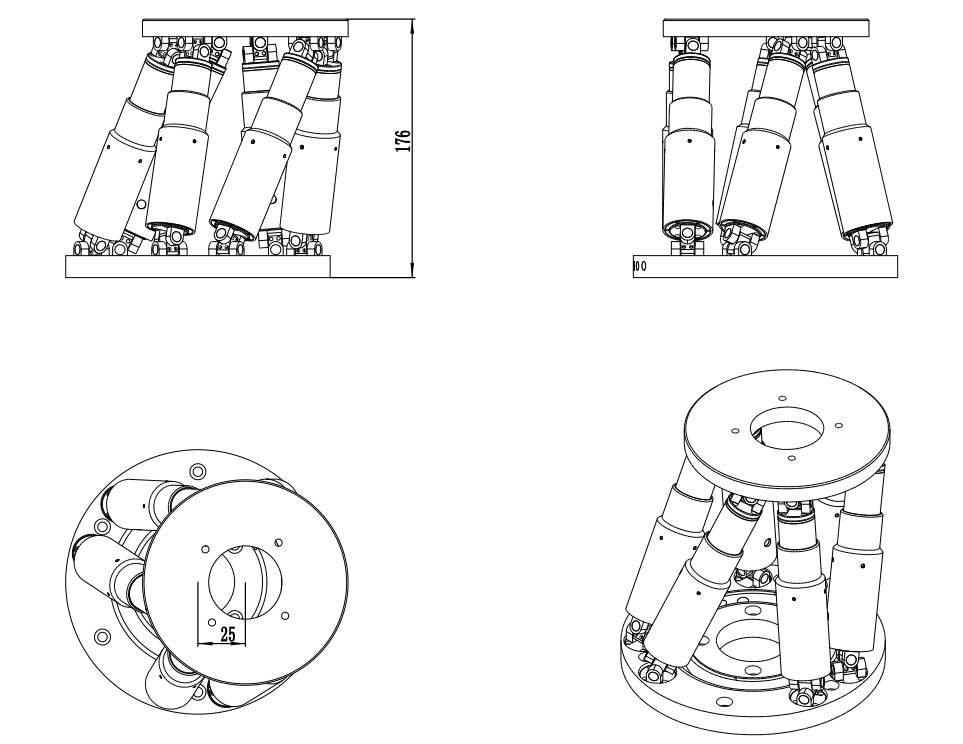 RUHX-180最大平移量
---------------------------------------------------------------------------------------------------------------------
RUHX-180最大平移量
---------------------------------------------------------------------------------------------------------------------
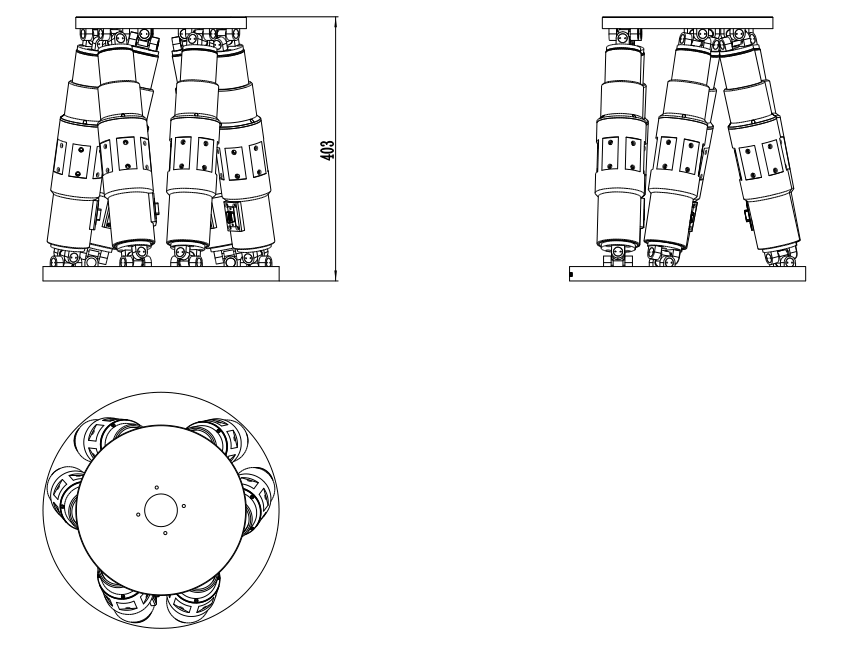
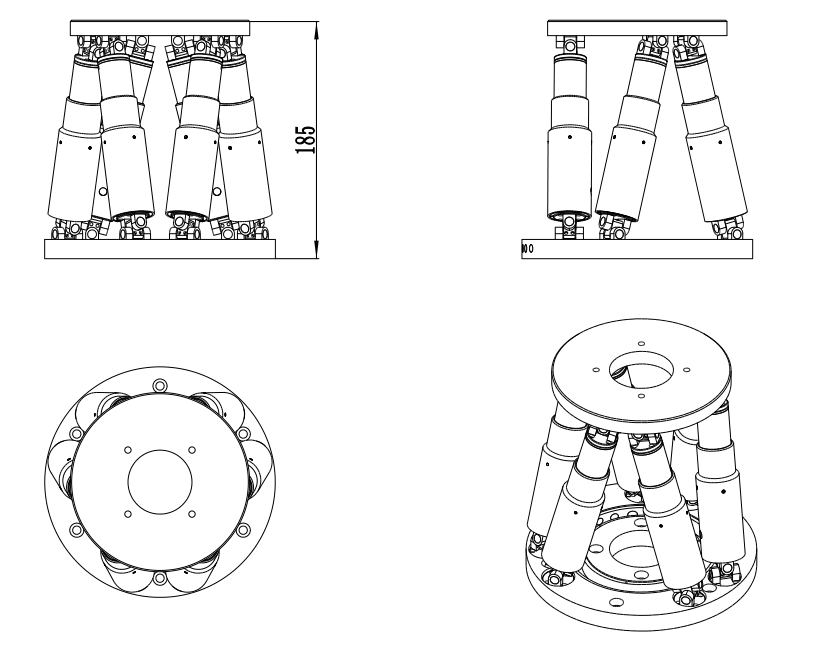 RUHX-180最高位置
---------------------------------------------------------------------------------------------------------------------
RUHX-180最高位置
---------------------------------------------------------------------------------------------------------------------

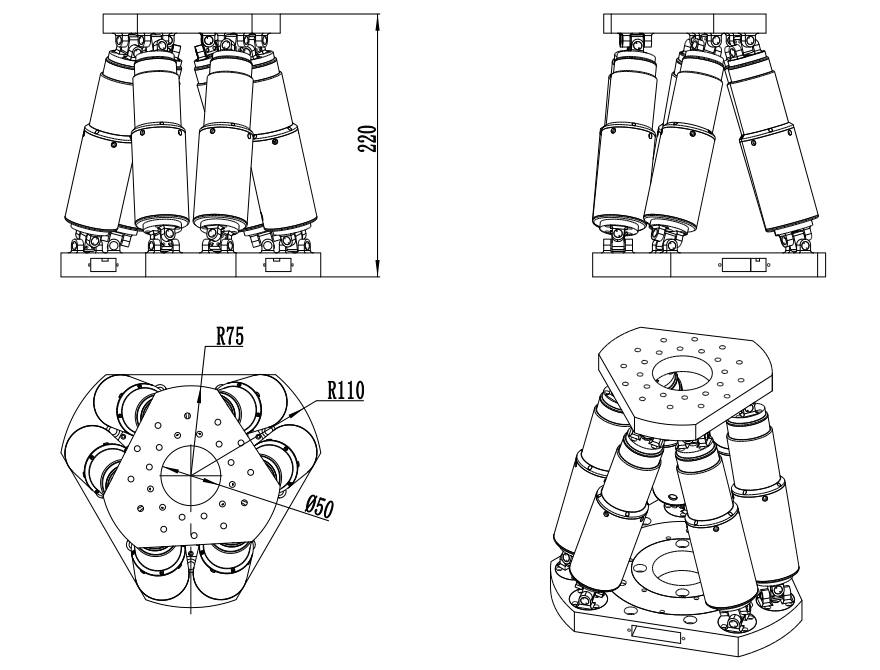 RUHX-220最低位置
---------------------------------------------------------------------------------------------------------------------
RUHX-220最低位置
---------------------------------------------------------------------------------------------------------------------
 RUHX-220最大平移量
---------------------------------------------------------------------------------------------------------------------
RUHX-220最大平移量
---------------------------------------------------------------------------------------------------------------------
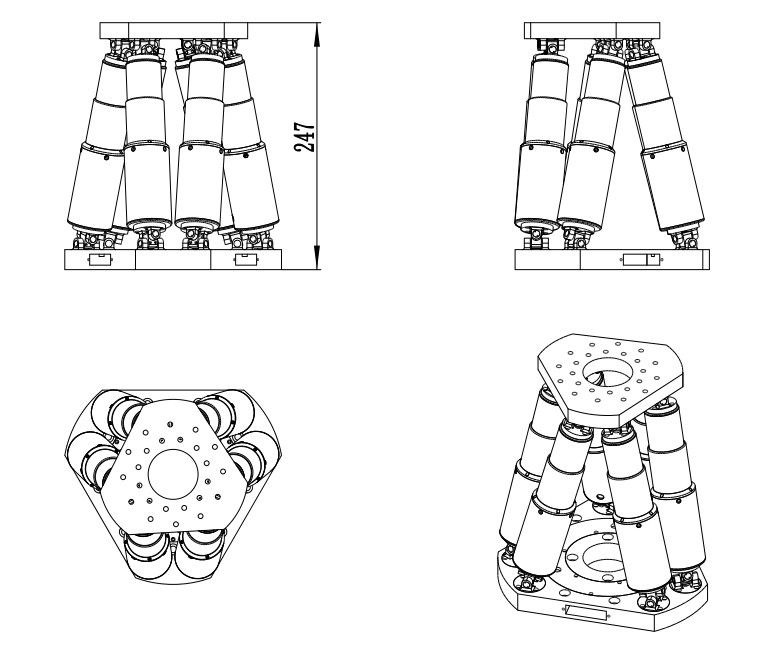 RUHX-220最高位置
---------------------------------------------------------------------------------------------------------------------
RUHX-220最高位置
---------------------------------------------------------------------------------------------------------------------
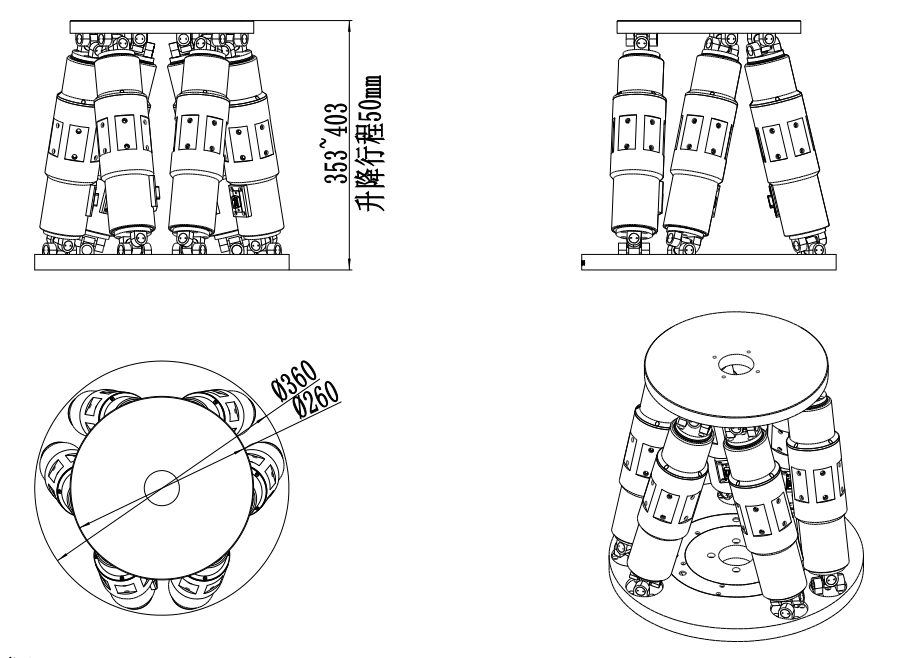 RUHX-360最低位置
---------------------------------------------------------------------------------------------------------------------
RUHX-360最低位置
---------------------------------------------------------------------------------------------------------------------
 RUHX-360最大平移量
---------------------------------------------------------------------------------------------------------------------
RUHX-360最大平移量
---------------------------------------------------------------------------------------------------------------------
 RUHX-360最高位置
RUHX-360最高位置